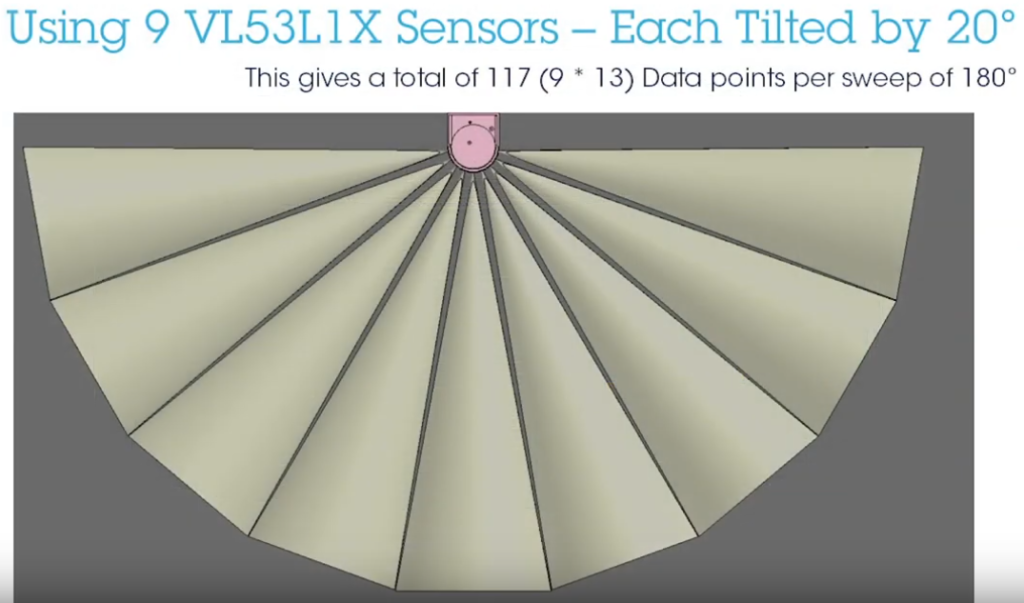
This 2D LiDAR (light detection and ranging) is an application example, based on nine VL53L1X long distance ranging ToF sensors. It allows a simple depth map of the environment to be created with a 180 ° FoV.
The VL53L1X ULD API (ultra lite driver application programming interface) can be downloaded from st.com under STSW-IMG009.
It is a set of C functions controlling one or many VL53L1X sensors which enable the development of end user applications.
This 2D LIDAR application is an example of how to control multiple sensors.
The P-NUCLEO-53L1A1 is the basis of the hardware.
P-NUCLEO-53L1A1 combines the STM32F401RE NUCLEO board and the X-NUCLEO-53L1A1 expansion board.
The nine sensors are based on VL53L1X breakout boards, which can be ordered from distributors as a kit of two boards under the reference VL53L1X-SATEL.